Electrical Engineering
Drones deliver on internet connectivity
Hovering airborne vehicles could connect smart sensors to the internet of things.



© 2019 KAUST
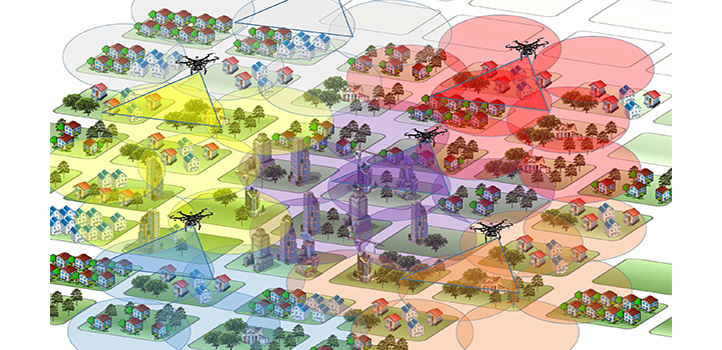
Drones could be the key to connecting large numbers of smart objects to create the internet of things (IoT). KAUST researchers have shown that using drones, also known as unmanned aerial vehicles (UAVs), to fly between clusters of IoT objects to collect their data could be highly efficient.
“IoT networks will revolutionize the way we monitor, control and communicate with everything around us,” says Osama Bushnaq, a Ph.D. student in Tareq Al Naffouri’s lab. Crop fields could be filled with sensors that monitor water and nutrient levels. Networks of sensors that detect wildlife could also be deployed.
“To enable IoT networks, huge numbers of low-cost, self-powered sensors are needed,” Bushnaq says. Traditional wireless data transfer is unsuitable for this purpose due to the limited power supply of each sensor and the complexity of connecting so many devices.
Sending UAVs to gather data via low-power, short-range transmission could be an alternative, transferring the burden of data aggregation from each individual sensor to a single machine that can autonomously return to base for recharging. The challenge is to calculate the most efficient approach to data collection to minimize mission time and maximize productivity.

Tareq Al Naffouri (left) and Osama Bushnaq discuss the potential of their data collection model.
© 2019 KAUST
“Imagine a field randomly covered with IoT sensors,” Bushnaq says. “Covering a small area of the field at each hovering location improves communication between the UAV and the devices, reducing data aggregation time,” he explains. However, the UAV needs to spend more time traveling between all the IoT devices in the field. Minimizing the total mission time involves optimizing the UAV coverage area, the number and location of hovering locations, and the UAV’s path between each location.
The team split the problem into components. For a given number of hovering locations, the team first calculated where the optimal hovering locations would be. They then applied the classic traveling salesman computer science problem to identify the best route between locations and optimized the data transmission rate. “The process is repeated for different numbers of hovering locations until an optimal tradeoff between hovering and traveling times is obtained,” Bushnaq says. The approach cut the mission time by up to 10 times for a field of 100 square meters.
The team is currently testing the idea of using UAVs with IoT sensors for fire detection. “We are studying how such a system can be used for forest fire detection and the tradeoff between system cost and fire detection reliability,” Al Naffouri says.
References
- Bushnaq, O.M., Celik, A., ElSawy, H., Alouini, M.-S.& Al-Naffouri, T.Y. Aeronautical data aggregation and field estimation in IoT networks: Hovering & traveling time dilemma of UAVs. IEEE Transactions on Wireless Communications 18, 4620 (2019).| article
ABOUT THE AUTHOR
Osama Bushnaq
Ph.D. Student

You might also like

Electrical Engineering
Laser security system protects online data

Electrical Engineering
Seeing smarter with a light-controlled synaptic device
Electrical Engineering
Gallium oxide electronics withstand extreme cold

Computer Science
AI-based hydrogen plant models improve power grid stability

Electrical Engineering
Quantum dot lasers outshine expectations
Bioengineering
Self-aware biosensors boost digital health monitoring

Bioengineering
Smart patch detects allergies before symptoms strike
Computer Science